Получение данных с can-шины автомобиля
Содержание:
- Что такое CAN шина и принцип работы
- Что такое CAN-шина и принцип ее работы
- Что такое CAN-шина
- Возможно, вам также будет интересно
- Особенности устройства CAN-шины
- Арбитраж и сигналы на шине CAN
- Определение КАН-шины
- История разработки и унификации Controller Area Network
- 3 Кан-интерфейс и диагностика системы
- Микроконтроллеры с CAN-модулем
- Можно ли сделать анализатор своими руками?
- Как подключить сигнализацию по CAN-шине
- Принцип действия КАН-модуля
- Стандартный кадр CAN
- Могут ли быть проблемы в работе CAN-шин?
Что такое CAN шина и принцип работы
Автомобильный электронный КАН модуль представляет собой сеть контроллеров, предназначенных для объединения всех управляющих блоков машины в одну сеть. Основная особенность заключается в том, что объединение элементов происходит с использованием одного проводника. Сам цифровой интерфейс на авто включает в себя пару кабелей, именуемых CAN. Информация, которая поступает по каналам от одного блока к другому, передается в зашифрованном виде.
Где находится устройство
Место установки CAN шины зависит от конкретной модели автомобиля, этот момент надо уточнять в сервисном руководстве к машине. Он может располагаться в моторном отсеке или в салоне, под панелью приборов. Подробно на фото показаны примеры расположения КАН интерфейсов.
Кан модуль в одном из жгутов со штатной проводкой Расположение шины в багажном отсеке Шина КАН под приборной панелью автомобиля
Обычно блок управления сигнализацией ставится под контрольным щитком либо за «приборкой» в салоне машины.
Функции
Функции, выполняющиеся интерфейсом КАН:
- возможность подключать к электросети транспортного средства и настраивать любые устройства, в том числе автосигнализации;
- более упрощенный алгоритм подключения и работы дополнительного оборудования и систем, установленных в автомобиле;
- возможность одновременной передачи и получения цифровой информации и ее анализа от различных источников;
- снижение величины воздействия внешних помех на работу основных и дополнительных систем;
- более быстрое подключение функции автозапуска противоугонной системы;
- ускорение процесса передачи данных к конкретным устройствам и механизмам машины.
Режимы
Цифровая система может функционировать в нескольких режимах:
- Автономный или фоновый. При его активации все системы выключены, но на КАН интерфейс подается питание. Значение напряжения достаточно низкое, поэтому такой режим работы не позволит разрядить АКБ.
- Режим пуска. Он работает, когда водитель устанавливает ключ в замок и прокручивает его в положение зажигания либо кликает по кнопке Старт/Стоп. Производится включение функции стабилизации питания. Напряжение начинает поступать на датчики и регуляторы.
- Активный режим функционирования. При его включении обмен информации начинает происходить между всеми датчиками и регуляторами. Когда активирован активный режим, значение потребления энергии может возрасти до 85 мА.
- Режим отключения либо засыпания. При остановке мотора все датчики и системы, подключенные к интерфейсу КАН, перестают работать. Производится их отключение от электросети машины.
Характеристики
Отдельно следует сказать об основных характеристиках скорости работы интерфейса:
- общая величина скорости передачи данных с информацией составляет 1 мб/с;
- при отправке информации между микропроцессорными устройствами этот показатель составит 500 кб/с;
- скорость получения данных к автомобильной системе «Комфорт» составляет 100 кб/с.
Что такое CAN-шина и принцип ее работы
КАН-шина представляет собой сеть контроллеров. Устройство используется для объединения всех управляющих модулей автомобиля в одну рабочую сеть с общим проводом. Этот девайс состоит из одной пары кабелей, которая называется CAN. Информация, передающаяся по каналам из одного модуля на другой, отправляется в закодированном виде.
Схема подключения устройств к CAN-шине в Мерседесе
Какие функции может выполнять CAN-шина:
- подключение к автомобильной бортовой сети любых девайсов и устройств;
- упрощение алгоритма подсоединения и функционирования вспомогательных систем машины;
- блок может одновременно получать и передавать цифровые данные из разных источников;
- использование шины снижает воздействие внешних электромагнитных полей на функционирование основных и вспомогательных систем машины;
- CAN-шина позволяет ускорить процедуру передачи информации к определенным устройствам и узлам автомобиля.
Эта система работает в нескольких режимах:
- Фоновый. Все устройства отключены, но на шину подается питание. Величина напряжения слишком мала, поэтому разрядить аккумуляторную батарею шина не сможет.
- Режим запуска. Когда автолюбитель вставляет ключ в замок и проворачивает его либо жмет кнопку Старта, происходит активация устройства. Включается опция стабилизации питания, которое подается на контроллеры и датчики.
- Активный режим. В этом случае между всеми контроллерами и датчиками происходит обмен данными. При работе в активном режиме параметр потребления энергии может быть увеличен до 85 мА.
- Режим засыпания или отключения. При глушении силового агрегата контроллеры КАН перестают функционировать. При включении режима засыпания все узлы машины отключаются от бортовой сети.
Канал Виалон СУшка в своем видео рассказал о КАН-шине и что надо знать про ее эксплуатацию.
Плюсы и минусы
Какими преимуществами обладает КАН-шина:
- Простота установки устройства в автомобиль. Владельцу машины не придется тратиться на монтаж, поскольку выполнить эту задачу можно самостоятельно.
- Быстродействие устройства. Девайс позволяет быстро обмениваться информацией между системами.
- Устойчивость к воздействию помех.
- Все шины обладают многоуровневой системой контроля. Ее использование дает возможность предотвратить появление ошибок при передаче и приеме данных.
- В процессе функционирования шина автоматически разбрасывает скорость по разным каналам. Это позволяет обеспечить оптимальную работу всех систем.
- Высокая безопасность устройства, при надобности система блокирует несанкционированный доступ.
- Большой выбор устройств различных типов от разных производителей. Можно подобрать вариант, предназначенный для конкретной модели авто.
Какие недостатки характерны для устройства:
- В девайсах бывают ограничения по объему передаваемых данных. В современных автомобилях используется множество электронных девайсов. Их большое количество приводит к высокой загруженности канала передачи информации. Это становится причиной увеличения времени отклика.
- Большая часть отправляющихся по шине данных обладает конкретным назначением. На полезную информацию отводится маленькая часть трафика.
- При использовании протокола высшего уровня автовладелец может столкнуться с проблемой отсутствия стандартизации.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Возможно, вам также будет интересно
Недавно я получил письмо от читателя, который спрашивал, почему нет подробных статей о реализации TCPIP с практическими рекомендациями. Честно говоря, я никогда не думал об этом, потому что обычно предпочитаю формальному стеку TCPIP небольшие, понятные, пригодные для работы в домашних условиях Ethernetдрайверы. Как журнальный автор, я в первую очередь предположил, что нехватка литературы по стеку
Сети передачи данных могут быть классифицированы следующим образом: Автономные локальные сети (потоки данных территориально замкнуты в пределах предприятия, офиса, дома, квартиры). Локальные сети с выходом в транспортную (первичную) сеть (часть потребителей имеет выход за пределы локальной сети, например, в Интернет). Сети непосредственного доступа потребителей в транспортную сеть. Подобная упрощенная классификация в данном случае вполне достаточна
В начале 1998 г. компания Xilinx выпустила новую серию ПЛИС с архитектурой FPGA — семейство Spartan. Данная серия предназначена для использования в серийных проектах как альтернатива заказным специализированным ИМС.
Особенности устройства CAN-шины
Передаются данные, со скоростью 1Мбит/сек, по радиоканалам или на оптоволоконном уровне. Биты данных одномоментно превращаются в кадры (подобие ограниченных порций). Есть сложная схема разделения кадров на доминантные и рецессивные и приоритетов формирования очереди передачи, с применением арбитража. Однако в эти области высоких технологий, простому автолюбителю заглядывать нет никакой нужды.
На физическом уровне CAN-сеть – это непрерывная «шина» дифференциальной пары, в роли проводника информации, прописанной стандартом ISO. Доступ к ней осуществляется посредством драйвера CAN-шины.

Во всех системах современного автомобиля применяется протокол CAN для взаимодействия электронного блока управления с контрольными блоками систем, исполнительными устройствами, датчиками, и в целом всей совокупности периферийного оборудования. Устройство столь умного прибора, на удивление, очень простое (можно сказать примитивное) – два провода и чип. Вот и все!
Первые поколения прибора были снабжены множеством выходов, по каждому их которых передавался лишь один сигнал. Сейчас, по каждому проводу проходят сотни импульсов.
В последних выпусках есть функции подключения к смартфонам.
Есть заложенная функция предвидения и устранения некоторых неполадок электрооборудования автомобиля. Даже электробрелки зажигания, подключаясь через CAN, получают необходимые данные от ЭБУ автомобиля.
CAN – шина, практически, абсолютно нечувствительна к радиопомехам, с высокой степени изолированными контактами.
Арбитраж и сигналы на шине CAN
CAN – это протокол CSMA/CD, означающий, что каждый узел на шине может обнаруживать коллизии и откатываться на определенное время перед попыткой повторной передачи. Это обнаружение коллизий достигается посредством арбитража приоритетов на основе идентификаторов сообщений. Прежде чем обсудить арбитраж, давайте подробнее рассмотрим доминантные и рецессивные биты, используемые на шине CAN.
Интересным аспектом шины CAN является то, что она использует инвертированную форму логики с двумя состояниями: доминантным и рецессивным. На рисунке ниже показана упрощенная версия вывода и ввода CAN-трансивера. Поток битов ‘101’ поступает с / идет на CAN-контроллер и / или микроконтроллер
Обратите внимание, что когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH. Линия CANL всегда является дополнением CANH
Чтобы арбитраж работал, устройство CAN должно отслеживать как то, что оно отправляет, так и то, что в данный момент находится на шине, то есть то, что оно получает.
На следующем рисунке показаны сигналы CANH и CANL одновременно, так что вы можете видеть шину CAN в действии. Под сигналами шины изображено дифференциальное напряжение, которое соответствует доминантному и рецессивному состояниям сигналов CAN. Первые три сегмента во времени, t1 – t3, нарисованы так, чтобы соответствовать трем битам, показанным на предыдущем рисунке. Мы рассмотрим это с точки зрения драйвера вывода. Ввод драйвера изначально видит «1» и дополняет его до нуля, который помещается в CANH. CANL видит дополнение CANH и переводится в высокое логическое состояние. Это показано как t1 на рисунке
Обратите внимание, что напряжения CANH и CANL смещены относительно друг друга. В течение времени t1 дифференциал CANH — CANL очень близок к нулю, так как CANH и CANL имеют почти одинаковое напряжение
Этот период, когда драйвер посылает логику «1», в результате чего CANH и CANL близки к одному и тому же напряжению, мы называем рецессивным состоянием CAN.
Следующий отправленный бит – «0». CANH получает свое дополнение, и CANL снова получает дополнение CANH
Обратите внимание, что на этот раз напряжения CANH и CANL не близки друг к другу. Следовательно, дифференциальное напряжение (VDIFF) больше
Это CAN-доминантное состояние. Мы говорим, что логика инвертирована, потому что «1» приводит к понижению логического уровня шины, а «0» — к повышению. Входной приемник работает аналогично.
Как упоминалось ранее, чем меньше 11-битный идентификатор, тем выше приоритет сообщения. Каждый бит, который передает узел, он контролирует. Таким образом, узел обнаруживает, что сообщение с более высоким приоритетом размещается на шине. В тот момент, когда узел отправляет рецессивный бит, но обнаруживает доминантный бит на шине, он «отступает». Это называется неразрушающим арбитражем, потому что «победившее» сообщение продолжает передаваться без каких-либо проблем
Обратите внимание, что рецессивная логика «1» проигрывает доминантной логике «0». Это имеет смысл, поскольку более низкое значение идентификатора представляет более высокий приоритет
Чтобы лучше понять, что это значит, взгляните на следующий рисунок, на котором показаны три узла на шине CAN, пытающиеся получить контроль
Важно помнить, что каждый раз, когда отображается рецессивный бит, контроллер отправляет «1», в то время как доминантные биты соответствуют отправке «0»
Узлы 1–3 все посылают поток битов. Этот поток битов представляет идентификаторы сообщений и их приоритет. Для начала все три узла отправляют «1», который представлен на шине CAN как рецессивный бит. Затем каждый узел отправляет «0» или доминанатный бит. Третий бит, помещенный в шину – это еще один бит «1» или рецессивный бит. На этом этапе ни один из узлов не обнаружил никакого конфликта с другим узлом на шине, поэтому они продолжают передавать.
Для четвертого бита узел 1 отправляет «0» или доминантный бит. Узел 2 передает рецессивный бит, но обнаруживает доминантный бит на шине. Он немедленно «отступает», зная, что в данный момент отправляется сообщение с более высоким приоритетом. Узел 3 продолжает передачу, поскольку он считывает тот же доминантный бит, который он передал. Когда пятый бит помещается в шину, узел 3 затем распознает, что он имеет более низкий приоритет, и прекращает передачу. И узел 2, и узел 3 ждут определенное количество времени, прежде чем пытаться снова. Это показано в правой части рисунка, где выиграл арбитраж узел 3. Как видите, логический бит «0», соответствующий младшему идентификатору сообщения, позволяет проводить арбитраж.
Определение КАН-шины
Несмотря на свой богатый функционал, визуально КАН-шина выглядит достаточно примитивно. Все ее составляющие – это чип и два провода. Хотя в самом начале своей «карьеры» (80-е года), для контакта со всеми датчиками, необходимо было более десятка штекеров. Происходило так, потому что каждый отдельный провод отвечал за один единственный сигнал, сейчас же их количество может достигать сотни. Кстати, раз мы уже упомянули датчики, рассмотрим, что именно контролирует наш механизм:
- КПП;
- Двигатель;
- Система антиблокировки;
- Подушка безопасности;
- Дворники;
- Панель приборов;
- Гидроусилитель руля;
- Котроллеры;
- Зажигание;
- Бортовой компьютер;
- Мультимедийная система;
- GPS навигация.
Кроме того, современная КАН-шина может не только проверять оборудование машины, но и даже устранять некоторые сбои! А отличная изоляция всех контактов инструмента, позволяет ему полностью оградить себя от любого рода помех!
История разработки и унификации Controller Area Network
Компания BOSCH, производя исследования в области автоматизации в 80-х годах прошлого века, предложила стандарт микроконтроллерной связи, который можно было применять и в автомобилестроении.
Стандарт CAN применяется не только в автомобилях. В настоящее время его используют в концепции «умный дом», промышленной автоматике и т.д.
Применительно к автомобильной технике стандарт CAN (Controller Area Network) адаптирован к шине с физическим уровнем. Она организована при помощи витой пары проводников, по которым идут пакеты сигналов разной полярности.
Такой стандарт получил международную классификацию ISO 11898. Кадр (пакет) включает 11-битный информационный сигнал (либо 29-битный в расширенном режиме).
В общем, CAN-шина не обязательно может быть реализована при помощи витой пары проводников. Это может быть и оптоволокно, и радиоканал.
Можно предположить, что с введением беспилотных транспортных средств CAN-шина трансформируется в мобильный интерфейс передачи информации одного, а возможно, и комплекса автомобилей.
3 Кан-интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.
 ЭБУ двигателя с межсетевым интерфейсом
ЭБУ двигателя с межсетевым интерфейсом
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу «К»-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
https://youtube.com/watch?v=m7dxr8ClEUQ
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
Микроконтроллеры с CAN-модулем
Одним из факторов, обеспечивших популярность CAN, является богатый выбор и доступная цена элементной базы различных производителей — Infineon, Motorola, Microchip, Philips и др.
В данной статье упор сделан на элементную базу Infineon. Такое решение основано, в частности, на результатах опроса, проводимого на сайте Keil Software (www.keil.com) для микроконтроллерных платформ 8051/251/С166. На вопрос, какой микроконтроллер со встроенным CAN вы используете, по выборке из 2111 респондентов ответы распределились согласно табл. 1.
Таблица 1. Результаты опроса: «Какой микроконтроллер со встроенным CAN вы используете?»
| Результат | Фирма | Тип микроконтроллера |
| 18% | Infineon | C505C/C515C |
| 28% | Infineon | C16x |
| 13% | Dallas | DS80C390 |
| 13% | Philips | 591/592/598 |
| 22% | Atmel/Temic | T89C51CC01 |
| 6% | ST Micro | ST10 |
Фирма Infineon выпускает продукты во всех классах цена/производительность. В настоящее время доступны как 8-разрядные контроллеры C505CA, C515C, так и 16-разрядные: C161CS, C164CI, C167CR, 167CS (табл. 2). Самым дешевым кристаллом с CAN является C505CA. МК C161CS и C167СS содержат два CAN-модуля. Самый мощный и дорогой микроконтроллер TriCore TC1775 также содержит реконфигурируемый модуль TwinCAN с двумя модулями CAN на 32 сообщения. TriCore — это первый 32-разрядный микроконтроллер Infineon с архитектурой DSP, оптимизированный для встроенных приложений реального времени, который заменяет собой МК, процессор DSP и заказную микросхему ASIC.Встроенный модуль соответствует спецификации CAN V2.0 B active и содержит память на 15 сообщений для приема/передачи с собственными идентификаторами, битами состояния и управления. Кроме того, он содержит регистры маски для фильтрации входящих сообщений и оснащен двумя приемными буферами. Встроенный модуль CAN позволяет строить системы с разнообразными задачами, используя минимальное количество микросхем внешнего интерфейса. Подключение любого из микроконтроллеров Infineon к CAN-шине осуществляется по одним и тем же принципам. Пример соединения C167CR с CAN-шиной представлен на рис. 7.
Таблица 2. CAN-микроконтроллеры фирмы Infineon
| Тип | Версия CAN | Кол-во сообщ. | CAN-модуль | Корпус | Примечание |
| С505СА | V2.0 B | 15 | 1 x CAN | MQFP-44 | 8 bit MC |
| С151С | V2.0 B | 15 | 1 x CAN | MQFP-80 | 8 bit MC |
| С161СS | V2.0 B | 30 | 2 x CAN | TQFP-128 | 16 bit MC |
| C164CI | V2.0 B | 15 | 1 x CAN | MQFP-80 | 16 bit MC |
| C167CR | V2.0 B | 15 | 1 x CAN | MQFP-144 | 16 bit MC |
| C167CS | V2.0 B | 30 | 2 x CAN | MQFP-144 | 16 bit MC |
| TC1775 | V2.0 B | 32 | TwinCAN | BGA-329 | 32 bit MC |
| SAE81C90 | V2.0 A | 16 | 1 x CAN | PLCC-44 | Stand Alone |
| SAE81C91 | V2.0 A | 16 | 1 x CAN | PLCC-28 | Stand Alone |
| SAK82C900 | V2.0 B | 32 | TwinCAN | P-DSO-28 | Stand Alone |
Кроме того, следует сказать также несколько слов о МК фирмы Philips — одного из родоначальников элементной базы CAN. На смену устаревшему автономному CAN-контроллеру Philips PCA82C200 пришел полностью совместимый с ним контроллер SJA1000, работающий со стандартом CAN V2.0 B. Необходимо отметить, что PCA82C200 поддерживает только стандарт CAN V2.0 A и способен передавать и принимать только стандартный CAN-протокол, то есть при приеме расширенного кадра он генерирует ошибку и может разрушить всю сеть. В SJA1000 за счет поддержки стандарта PeliCAN (чтение и запись счетчиков ошибок, программирование их количественного порога) значительно расширены возможности по управлению CAN.
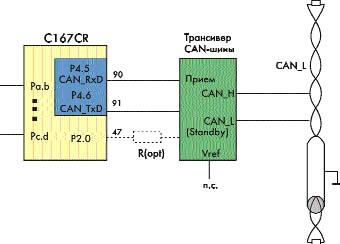
Рис. 7. Пример соединения МК С167CR c CAN-шиной
В результате объединения SJA1000 с ядром XA появился 16-разрядный МК XAC3 с интегрированным CAN-интерфейсом
Совместимый с 8051 режим микроконтроллера Philips XA позволяет осуществить простой переход от 8-разрядной архитектуры 8051 к 16-разрядной, что особенно важно для сохранения преемственности программного обеспечения. Среди 8-разрядных МК следует отметить также Philips P80C592, P8xC591 и 8xCE598
Motorola тоже предлагает широкий спектр микроконтроллеров с интегрированным CAN-модулем: от самых дешевых 8-разрядных МК 68HC05X до 32-разрядного Power PC MPC555 с дуальным CAN V2.0 B.
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
Общая схема для сборки анализаторного устройства
Плата, использующаяся в качестве основы
Как подключить сигнализацию по CAN-шине
Для подключения КАН-шины своими руками к автосигнализации машины с автозапуском либо без него надо знать, где находится блок управления противоугонной системой. Если установка сигнализации осуществлялась самостоятельно, то процесс поиска не вызовет сложностей у автовладельца. Управляющий модуль обычно ставится под приборной панелью в районе рулевого колеса либо за контрольным щитком.
Как произвести процедуру подключения:
- Противоугонная система должна быть установлена и подключена ко всем узлам и элементам.
- Найдите толстый кабель оранжевого цвета, он подключается к цифровой шине.
- Адаптер противоугонной системы подсоединяется к контакту найденной шины.
- Производится монтаж устройства в надежном и удобном месте, девайс фиксируется. Надо заизолировать все электрические цепи, чтобы не допустить их перетирания и утечки тока. Производится диагностика правильности выполненной задачи.
- На завершающем этапе настраиваются все каналы для обеспечения рабочего состояния системы. Также надо задать функциональный ряд устройству.
Загрузка …
Принцип действия КАН-модуля
Кан-модуль для сигнализации фактически является интерфейсным блоком, который позволяет прошивке охранной системы управлять цепями автомобиля типизированным образом. Например, при постановке автомобиля на охрану центральный блок подает на CAN-модуль соответствующую команду, а дальнейшие действия уже будут определяться прошивкой модуля. Однократно выполнив программирование КАН-модуля в процессе установки, о нем в дальнейшем можно просто забыть – сервисные функции сигнализации можно будет настраивать так же, как если бы его и не было.
При этом само по себе программирование не низкоуровневое, то есть установщику не обязательно знать, какие конкретно команды нужно подавать на шину для определенного действия: достаточно просто выбрать номер прошивки, соответствующий модели и комплектации автомобиля. Узнать номер можно на сайте производителя охранной системы. Например, прошивка КАН-модуля «Старлайн» для Honda CR-V 2017 года с кнопкой «Старт-Стоп» имеет номер 2444.
Стандартный кадр CAN
Стандартный кадр сообщения CAN состоит из нескольких битовых полей. Они показаны на следующем рисунке.

Первый бит – это начало кадра (SOF). Этот доминирующий бит представляет начало сообщения CAN. Далее идет 11-битный идентификатор, который устанавливает приоритет сообщения CAN. Чем меньше идентификатор, тем выше приоритет сообщения.
Бит запроса удаленной передачи (RTR) обычно является доминантным, но он становится рецессивным, когда один узел запрашивает данные у другого. Бит расширения идентификатора (IDE) является доминантным, когда отправляется стандартный кадр CAN, а не расширенный. Бит r0 зарезервирован и в настоящее время не используется. Кусок кода длины данных (DLC) показывает, сколько байтов данных содержится в этом сообщении.
Далее идут сами данные, представляющие собой столько байтов, сколько представлено в битах DLC. Циклическая проверка избыточности (CRC) – это 16-битная контрольная сумма для обнаружения ошибок в передаваемых данных. Если сообщение принято правильно, принимающий узел перезаписывает рецессивный бит подтверждения (ACK) доминантным битом. ACK также содержит бит-разделитель для синхронизации. Конец кадра (EOF) означает конец сообщения CAN и имеет ширину 7 бит для обнаружения ошибок вставки битов. Последняя часть сообщения CAN – это межкадровое пространство (IFS), используемое в качестве временной задержки. Эта временная задержка точно соответствует времени, необходимому контроллеру CAN для перемещения полученного сообщения в буфер для дальнейшей обработки.
Могут ли быть проблемы в работе CAN-шин?
В современном авто цифровая шина используется постоянно. Она работает одновременно с несколькими системами, причем по ее каналам связи постоянно передается информация. Со временем в работе устройства могут возникнуть неполадки. В результате анализатор данных будет функционировать неверно. При обнаружении неполадок автовладелец должен найти причину.
По каким причинам возникают сбои в работе:
- повреждение или обрыв электроцепей устройства;
- произошло замыкание в системе на аккумулятор либо массу;
- могли замкнуть системы КАН-Хай или КАН-Лоу;
- произошло повреждение прорезиненых перемычек;
- разряд аккумуляторной батареи или снижение напряжения в бортовой сети, вызванное некорректной работой генераторного устройства;
- произошла поломка катушки зажигания.
О ремонте CAN-шины приборной панели в автомобиле Форд Фокус 2 можно узнать из ролика, снятого пользователем Brock – Video Corporation.
Процесс поиска неисправности осуществляется так:
- Сначала автовладелец производит диагностику состояния системы. Целесообразно осуществить компьютерную проверку, чтобы выявить все неполадки.
- На следующем этапе производится диагностика уровня напряжения и сопротивления электрических цепей.
- Если все в порядке, то проверяется параметр сопротивления прорезиненых перемычек.
Диагностика работоспособности КАН-шины требует определенных навыков и опыта, поэтому процедуру поиска неисправностей лучше доверить специалистам.