Устройство синхронного двигателя
Содержание:
- Основные параметры электродвигателя
- Принцип действия [ править | править код ]
- Классификации
- Применение
- Типы синхронных электродвигателей
- Область применения
- Синхронные генераторы
- Пуск синхронного двигателя
- Способы запуска
- Система управления
- Конструкции и типы синхронного электродвигателя с постоянными магнитами
- Принцип работы синхронного двигателя
- Синхронный электродвигатель
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Классификации
По источнику энергии
Двигатели могут использовать следующие типы источников энергии:
- электрические;
- постоянного тока (электродвигатель постоянного тока);
- переменного тока (синхронные и асинхронные);
- электростатические;
- химические;
- ядерные;
- гравитационные;
- пневматические;
- гидравлические;
- лазерные.
По типам движения
Получаемую энергию двигатели могут преобразовывать к следующим типам движения:
- вращательное движение твёрдых тел;
- поступательное движение твёрдых тел;
- возвратно-поступательное движение твёрдых тел;
- движение реактивной струи;
- другие виды движения.
Электродвигатели, обеспечивающие поступательное и/или возвратно-поступательное движение твёрдого тела;
- линейные;
- индукционные;
- пьезоэлектрические.
Некоторые типы электроракетных двигателей:
- ионные двигатели;
- стационарные плазменные двигатели;
- двигатели с анодным слоем;
- радиоионизационные двигатели;
- коллоидные двигатели;
- электромагнитные двигатели и др.
По устройству
Двигатели внешнего сгорания — класс двигателей, где источник тепла или процесс сгорания топлива отделены от рабочего тела:
- поршневые паровые двигатели;
- паровые турбины;
- двигатели Стирлинга;
- паровой двигатель.
Двигатели внутреннего сгорания — класс двигателей, у которых образование рабочего тела и подвод к нему тепла объединены в одном процессе и происходят в одном технологическом объеме:
- двигатели с герметично запираемыми рабочими камерами (поршневые и роторные ДВС);
- двигатели с камерами, откуда рабочее тело имеет свободный выход в атмосферу (газовые турбины).
По типу движения главного рабочего органа ДВС с запираемыми рабочими камерами делятся на ДВС с возвратно-поступательным движением (поршневые) (делятся на тронковые и крецкопфные) и ДВС с вращательным движением (роторные), которые по видам вращательного движения делятся на 7 различных типов конструкций. По типу поджига рабочей смеси ДВС с герметично запираемыми камерами делятся на двигатели с принудительным электрическим поджиганием (калильным или искровым) и двигатели с зажиганием рабочей смеси от сжатия (дизель).
По типу смесеобразования ДВС делятся на: с внешним смесеобразованием (карбюраторные) и с непосредственным впрыском топлива в цилиндры или впускной коллектор (инжекторные). По типу применяемого топлива различают ДВС работающие на бензине, сжиженном или сжатом природном газе, на спирте (метаноле) и пр.
Реактивные двигатели
Воздушно-реактивные двигатели:
- прямоточные реактивные (ПВРД);
- пульсирующие реактивные (ПуВРД);
- газотурбинные двигатели:
- турбореактивные (ТРД);
- двухконтурные (ТРДД);
- турбовинтовые (ТВД);
- турбовинтовентиляторные ТВВД;
Ракетные двигатели
- жидкостные ракетные двигатели;
- твердотопливные ракетные двигатели;
- ядерные ракетные двигатели;
- некоторые типы электроракетных двигателей.
По применению
В связи с принципиально различными требованиями к двигателю в зависимости от его назначения, двигатели идентичные по принципу действия, могут называться «корабельными», «авиационными», «автомобильными» и тому подобными.
Категория «Двигатели» в патентоведении одна из наиболее активно пополняемых. В год по всему миру подаётся от 20 до 50 заявок в этом классе. Часть из них отличаются принципиальной новизной, часть — новым соотношением известных элементов. Новые же по конструкции двигатели появляются очень редко.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Типы синхронных электродвигателей
Cинхронный электродвигатель с обмоткой возбуждения
Синхронный электродвигатель с обмоткой возбуждения имеет явнополюсный ротор с электромагнитным возбуждением. Для создания постоянного магнитного поля ротора требуется источник постоянного тока. Обмотки ротора двигателя соединены с контактными кольцами к которым через щетки подводится постоянный ток. Преимуществом данных двигателей является отсутствие дорогостоящих магнитов, недостатком — наличие щеток и необходимость питания обмоток ротора.
Cинхронный электродвигатель с постоянными магнитами
Данный двигатель имеет ротор с постоянными магнитами. В отличии от коллекторного двигателя постоянного тока функции коллектора и щеток выполняют полупроводниковые ключи. Имеет такие же преимущества, что и коллекторный двигатель постоянного тока, при этом не требует текущего ремонта (бесщеточный) в процессе эксплуатации. Такой электродвигатель требует сложной системы управления. Бесщеточные синхронные электродвигатели с постоянными магнитами обладают рядом преимуществ над другими двигателями, обладая лучшими показателями: мощность/объем, КПД, момент/инерция и др.
Синхронный реактивный электродвигатель
Синхронный электрический двигатель с ротором из ферромагнитного материала. Принцип действия синхронного реактивного электродвигателя основан на свойствах ферромагнитных тел ориентироваться так, чтобы сцепленный с ним магнитный поток оказался максимальным. Основным преимуществом электродвигателя является: простота и низкая цена изготовления. При одинаковых размерах, реактивный электродвигатель развивает больший момент, чем асинхронный, но имеет более низкий коэффициент мощности. Данный электродвигатель для работы требует систему управления.
Гистерезисный электродвигатель
Синхронный электродвигатель с неявнополюсным гистерезисным ротором. Вращающий момент этого электродвигателя создается за счет магнитного гистерезиса материала ротора. Достоинствами гистерезисных двигателей являются простота устройства, надежность в эксплуатации, отсутствие пусковых приспособлений, плавность втягивания в синхронизм, практически неизменный ток при пуске и работе. К недостаткам можно отнести относительно высокую стоимость материала ротора.
Шаговый электродвигатель
Синхронный бесщеточный электродвигатель, который без устройств обратной связи преобразует сигнал управления в угловое перемещение ротора с фиксацией его в заданном положении. Главное преимущество шаговых электродвигателей — точность, а также возможность осуществлять позиционирование и регулировать скорость без датчика обратной связи.
Область применения
Область применения синхронных двигателей обусловлена рядом их особенностей, а именно:
- — стабильностью частоты вращения как при колебании напряжения в питающей электросети, так и при изменении величины механической нагрузки на валу;
- — возможностью работы с очень высоким коэффициентом мощности — вплоть до единицы.
Первое качество делает синхронные двигатели незаменимыми в качестве приводных для прецизионных обрабатывающих станков. Также часто синхронные двигатели используются для привода мощных насосных, компрессорных и вентиляционных установок. Этим же свойством обусловлено их практически исключительное применение в качестве гидрогенераторов и турбогенераторов на электрических станциях.
Вторая особенность синхронных двигателей делает привлекательным его использование в качестве источника реактивной энергии, что позволяет гибко регулировать значение коэффициента мощности и уровня напряжения в сети. При правильном заключении договоров на электроснабжение можно получить экономию средств, имея повышенное значение косинуса-фи.
При работе синхронного двигателя с коэффициентом мощности, равном единице, двигатель потребляет из сети только активную мощность, за счет чего снижаются потери мощности в питающих линиях электропередачи. Это обусловлено тем, что потери в линиях пропорциональны полной электрической мощности, а величина последней в рассматриваемом случае снижается, что происходит за счет уменьшения реактивной составляющей вплоть до нуля.
Работающий на холостом ходу в режиме перевозбуждения синхронный двигатель представляет собой синхронный компенсатор.
Мощный синхронный двигатель, оснащенный системами автоматической регулировки возбуждения с обратной связью по напряжению, а также форсирования тока возбуждения – это инструмент для регулирования и перераспределения потоков реактивной мощности и уровня напряжения в электрической сети.
Выбор синхронных двигателей при проектировании и в процессе реконструкции электросетей крупных потребителей обеспечивает повышение устойчивости работы энергосистемы, разгрузку линий электропередачи, улучшение качества электроэнергии, дает возможность минимизировать затраты на покупку электрической энергии.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните накарту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Пуск синхронного двигателя
Одним
из главных недостатков синхронных
двигателей является сложность их пуска
в ход. Пуск синхронных двигателей может
быть осуществлен при помощи вспомогательного
пускового двигателя или путем асинхронного
пуска.
Пуск
синхронного двигателя при помощи
вспомогательного двигателя. Если ротор
синхронного двигателя с возбужденными
полюсами развернуть другим, вспомогательным
двигателем до скорости вращения поля
статора, то магнитные полюсы статора,
взаимодействуя с полюсами ротора,
заставят ротор вращаться далее
самостоятельно без посторонней помощи,
в такт с полем статора, т. е. синхронно
(откуда эти двигатели и получили свое
название).
Для
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.
Порядок
пуска синхронного двигателя следующий.
Включая рубильник 3, пускают вспомогательный
асинхронный двигатель 2, который
разворачивает ротор синхронного
двигателя 1 до скорости, соответствующей
скорости поля статора. Скорость вращения
вспомогательного двигателя определяется
по тахометру1. Затем, включая рубильник
4 постоянного тока, возбуждают полюсы
ротора. Чтобы включить синхронный
двигатель в сеть трехфазного тока, его
нужно синхронизировать так же, как и
при включении синхронного генератора
на параллельную работу. Для этого
реостатом 5 устанавливают такое
возбуждение, чтобы напряжение обмотки
статора по вольтметру V было равно
напряжению сети, указываемому вольтметром
V1.
Электролампы
6, включенные параллельно ножам рубильника
7 трех-фазной сети, при разомкнутом
рубильнике будут мигать. Сначала мигание
будет частым, но если изменять скорость
вращения вспомогательного асинхронного
двигателя, то лампы будут мигать . все
реже и реже. Синхронный двигатель можно
включить в сеть трехфазного тока
рубильником 7 тогда, когда все три лампы
одновременно погаснут. Ротор двигателя
при этом входит в синхронизм и может
далее вращаться самостоятельно. Теперь
вспомогательный двигатель 2 рубильником
3 можно отключить от сети.
Сложность
пуска и необходимость вспомогательного
двигателя являются существенными
недостатками этого способа пуска
синхронных двигателей. Поэтому в
настоящее время он применяется редко.
Асинхронный
пуск синхронного двигателя. Для
осуществления этого способа пуска в
полюсных наконечниках полюсов ротора
укладывается дополнительная
короткозамкнутая обмотка. Так как во
время пуска в обмотке возбуждения 1
двигателя наводится большая э. д. с, то
по соображениям безопасности она
замыкается рубильником 2 на сопротивление
3
При
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
Эти
токи, взаимодействуя с вращающимся
полем статора, приведут ротор во вращение.
При достижении ротором наибольшего
числа оборотов (95—97% синхронной скорости)
рубильник 2 переключают так, чтобы
обмотку ротора включить в сеть постоянного
напряжения.
Недостатком
асинхронного пуска является большой
пусковой ток (в 5—7 раз больший рабочего
тока). Пусковой ток вызывает падение
напряжения в сети, а это отражается на
работе других потребителей. Для уменьшения
пускового тока применяют пуск при
пониженном напряжении с помощью реактора
2 или автотрансформатора.
В
настоящее время применяют почти
исключительно асинхронный пуск синхронных
двигателей ввиду его простоты и
надежности. Существуют также схемы
автоматического асинхронного пуска
синхронных двигателей
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Система управления
Если электромеханическая часть состоит преимущественно из трех компонентов, в числе которых ротор, статор и несущая конструкция в виде корпуса, то управляющая инфраструктура более сегментирована – количество элементов может достигать нескольких десятков. Другое дело, что их можно поделить на виды. В единственном числе будет представлен только инвертор. Он отвечает за функции коммутации, осуществляя подключение и переключение фаз. Основные же задачи контроля с подачей сигналов выполняют датчики. Главным из них является детектор положения ротора. Кроме этого, в состав управляющего блока вводится и система регуляции сигналов. Это узел с ключами, посредством которого реализуется связь датчиков и электромеханической начинки.
Информацию о позиции ротора обрабатывает микропроцессор. Внешне интерфейс этого блока представляет собой панель управления. На приеме она работает с сигналами широтно-импульсной модуляции (ШИМ-сигнал). Если предусматривается подача низковольтных сигналов, то в управляющем блоке устанавливается и транзисторный мост. Он преобразует сигнал в силовое напряжение, которое в дальнейшем подается на электродвигатель. Наличие датчиков с системой обработки импульсов как раз и отличает управление вентильным двигателем от средств контроля щеточно-коллекторных агрегатов. Другое дело, что возможность внедрения электронной аппаратуры с датчиками допускается и в коллекторных машинах наряду с механическими системами управления.
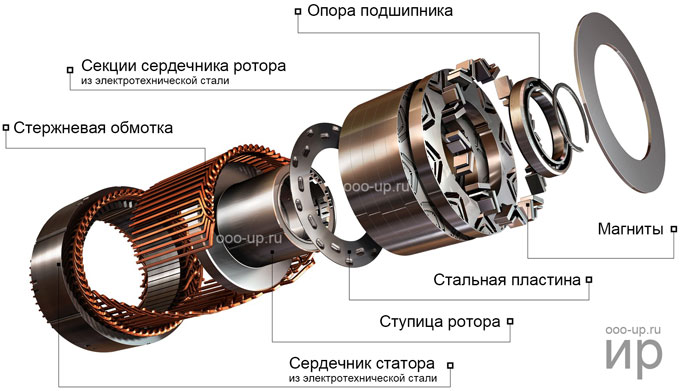
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.
Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором – электродвигатели обращенного типа.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
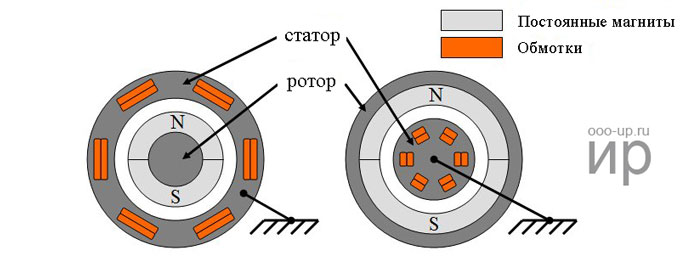
- По конструкции ротора синхронные двигатели делятся на:
- электродвигатели с явно выраженными полюсами;
- электродвигатели с неявно выраженными полюсами.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.
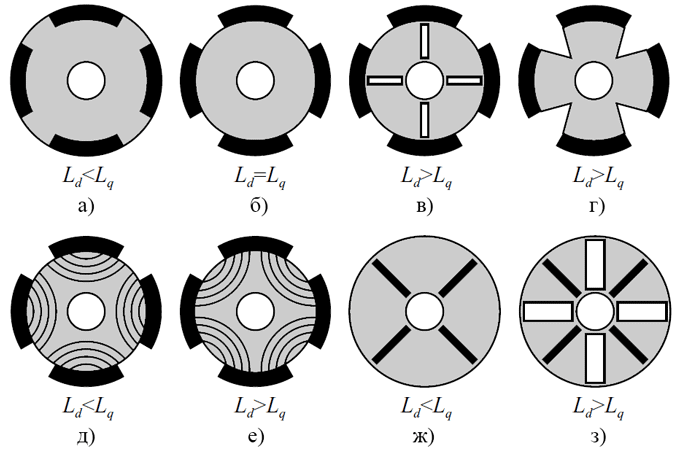
- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов(англ. SPMSM – surface permanent magnet synchronous motor);
- синхронный двигатель со встроенными (инкорпорированными) магнитами(англ. IPMSM – interior permanent magnet synchronous motor).
Ротор синхронного двигателя c поверхностной установкой постоянных магнитов
Ротор синхронного двигателя со встроенными магнитами
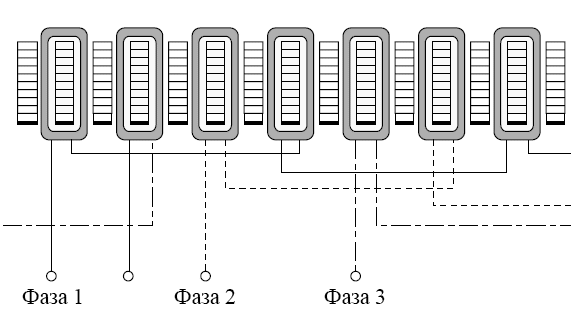
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
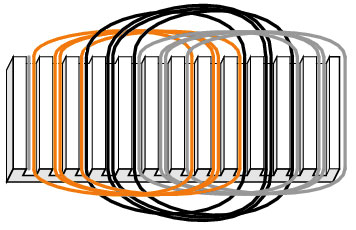
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3,…., k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток – невозможность влияния на форму кривой ЭДС .
Форма обратной ЭДС электродвигателя может быть:
трапецеидальная;
синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора .
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Синхронный электродвигатель
Итак, синхронный электродвигатель – это мотор с постоянной скоростью вращения ротора, плюс возможность регулировать эту скорость. Устройство синхронного мотора достаточно сложное. Чтобы в нем разобраться, необходимо рассмотреть фотографию ниже.
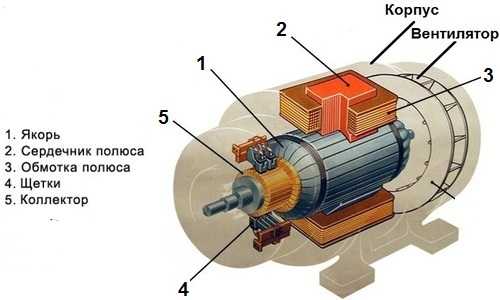
Здесь четко показано, что обмотки двигателя располагаются на якоре или роторе агрегата. Концы обмоток выведены и закреплены на токосъемное кольцо, а, точнее, к его секторам. Сам же ток подается на это же кольцо только через графитовые щетки, которые подключены к питающей сети.
У двигателя этой модели больше уязвимых мест, чем у асинхронной.
- Снашиваются графитные щетки.
- Плохой контакт между токосъемным кольцом и щетками за счет ослабления пружины, которая прижимает последние к кольцу (коллектору).
- Изнашиваются подшипники.
- Образование грязевого налета на поверхности токосъемного кольца.
Теперь переходим к другой позиции – принцип работы синхронного электродвигателя. Вращающийся момент внутри мотора образуется за счет взаимодействия магнитного поля, которое образуется в обмотках возбуждения, и тока, проходящего по якорю агрегата. Но тут есть один момент – изменяющееся направление тока (переменного) будет менять и направление вращения магнитного поля двигателя. Правда, смена вращения будет меняться и в корпусе аппарата, и на якоре одновременно. Вот почему вращение ротора мотора всегда происходит с одинаковой скоростью.
Именно поэтому изменить эту величину можно лишь тем, если изменить напряжение подаваемой на щетки электроэнергии. Вспомните пылесосы, где всасываемую мощность изменяют переключателем, который просто соединен с реостатом. А мощность пылесоса зависит от скорости вращения вала крыльчатки, то есть вала электродвигателя. Чем больше скорость, тем больше мощность всасывания.
Но синхронные электродвигатели в промышленности своего основного места не нашли. Здесь в основном используются асинхронные модели.